5月13日晚上,由学院、上海自主智能无人系统科学中心联合举办的智·信讲堂-抗“疫”特别系列讲座线上开讲。本次讲堂邀请了北京大学查红彬教授作“动态视觉与SLAM:在线学习的途径”主题报告,由张皓教授主持。
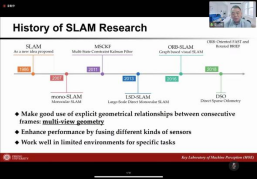
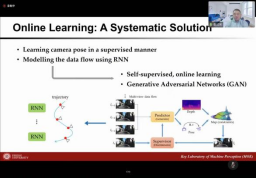
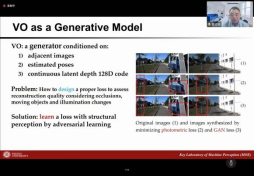
查红彬教授分别从SLAM的概念、研究进程、关键问题以及在线学习方案等方面展开报告。首先,查教授介绍了SLAM中定位与建图的耦合关系,并表示同步定位与建图是人类动态视觉系统的一个基本功能。然后介绍了SLAM研究的历史发展及一些相关的算法,详细分析目前SLAM算法的一些不足并指出关键问题是系统性表述的缺乏。接着介绍了传感器数据流的关键概念、预测器和地图的相关概念和在线学习方案。查教授还介绍了所在团队与SLAM相关的一些研究。最后详细地介绍了一项其团队的近期研究工作,是基于序贯对抗学习的自监督深度视觉测距,包括视觉测距的背景、基于学习的方法、存在的挑战以及该工作主要贡献和实验结果等。查教授丰富精彩的报告为学校师生的学习和科研工作带去了思想启发,也为同学们学习动态视觉与SLAM提供了有益指导。
报告结束后,查红彬教授就动态视觉和SLAM的相关问题与师生们们进行了交流。他也根据自身经历勉励同学们要积极拓宽视野,努力探索、发现并解决新的科学问题。此次报告进一步拓展了公司师生的科研视野,增强了同学们对动态视觉和SLAM的理解与认识。(文/图 张皓 王云姣)
