4月10日上午,由学院和上海自主智能无人系统科学中心联合开展的智·信讲堂-抗“疫”特别系线上开讲。本次讲堂邀请到了重庆大学宋永端教授作“关于PID控制的鲁棒和自适应特性”主题报告,由学院副经理张皓教授主持。宋永端教授是自动化及机器人领域国际著名专家,IEEE Fellow,国际欧亚科学院院士,国家级人才工程入选者,国际权威期刊IEEETransactions on Neural Networks and Learning主编。

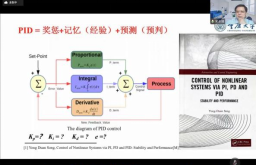
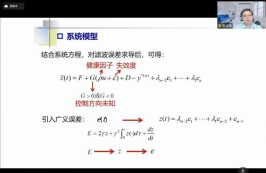
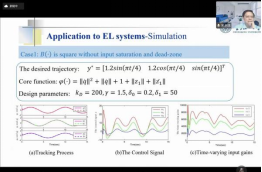
宋永端教授分别从PID控制的背景、PID控制的理论发展历程、PID控制新方法设计和应用等方面展开报告。报告中,宋教授首先介绍了PID控制的背景和早期理论成果、PID控制中隐含的智能和其在工业控制中的影响。然后进一步介绍早先和目前PID控制器的参数调节方法及其存在的问题与不足;接着对具有鲁棒自适应和容错能力装备PID控制新方法进行详细的分析,分别介绍系统模型转换、自适应鲁棒控制器的具体设计。对多入多出模型下方系统和非方系统的PID控制设计控制算法并给出数学证明。最后对提出的PID控制器新设计方法进行实际例子的验证,通过在实际机器人系统上的仿真和比较验证提出方法的有效性。宋永端教授丰富精彩的报告为学校师生的学习和科研工作带去了思想启发。
报告结束后,宋永端教授学术论文期刊投稿等问题与同学和老师们进行了交流,着重介绍了在IEEE TNNLS期刊上的投稿注意事项。他也根据自身科研经历勉励同学们要积极拓宽视野,努力探索、发现并解决新的科学问题。此次报告进一步拓展了公司师生的科研视野,增强了同学们对鲁棒自适应PID控制的理解与认识。(文/图 张皓 王云姣)
